Hi Rob,
thank you for your help. When I tried to adopt your hint to my use case, it first did not work. But then I found a reason: Service Tasks can not be interrupted by timer boundary events, at least not so easy. See here: Timer boundary event on service tasks - #6 by hassang .
My idea is now to try this approach:
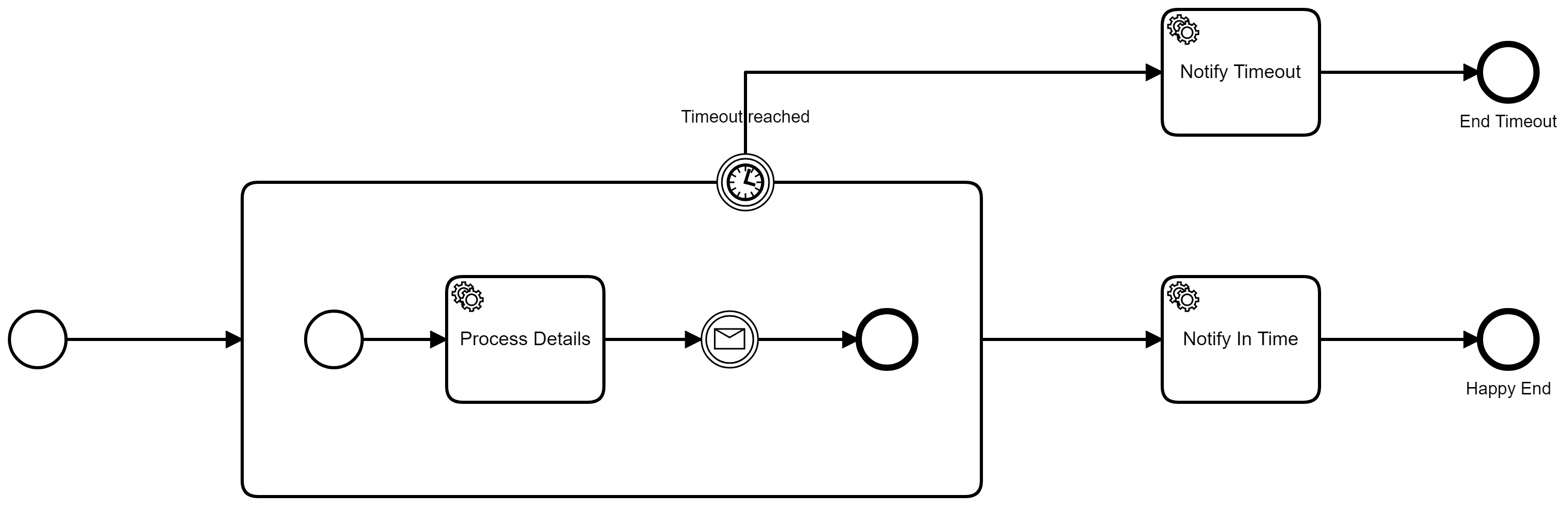
The intermediate message receive event must be triggered in the service task when it has finished. I think this is worth a shot.
Regards
Christian